多数城市NOA供应商曾经认为高精地图是不可或缺的一环,但随着认识加深,高精地图暴露出成本高、更新周期长的问题,让部分企业转变观点,开始倾向于提升车辆感知能力,以此降低高精地图产生的负面影响。
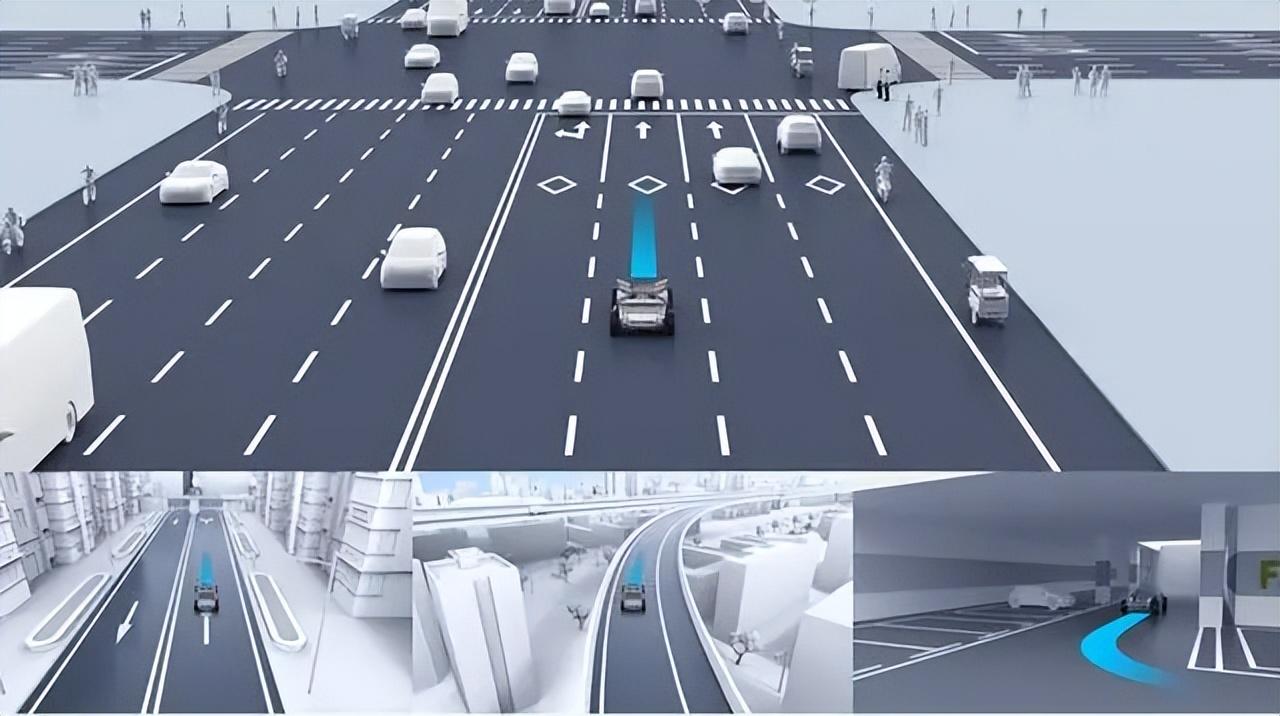
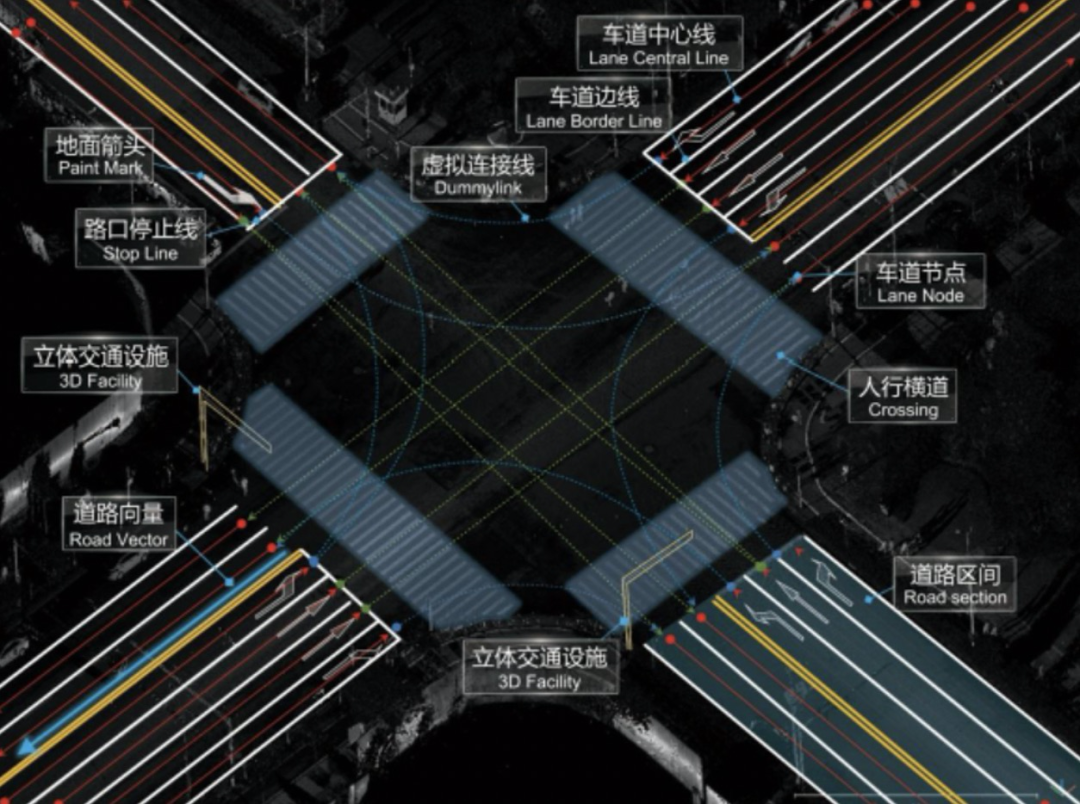
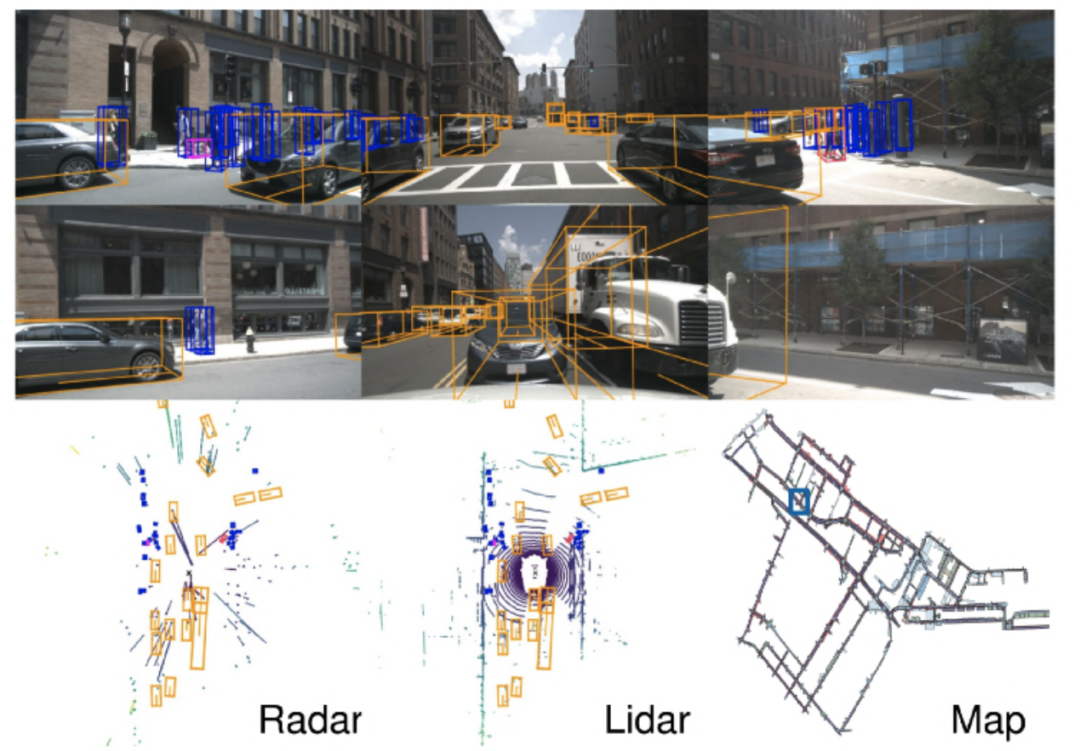
什么是NOA?简要来说,NOA(自动辅助导航驾驶)是高级驾驶辅助系统的一部分,基于车辆传感器、算法和高精地图数据,帮助驾驶员在高速公路和城市中安全地行驶。地图与感知相结合,相辅相成,实现辅助导航功能。高精地图负责进行路径规划,提供详细且精确的路面信息,车辆传感器(激光雷达、毫米波雷达和摄像头)负责收集实时路况信息,并将信息传输至感知算法,算法会将高精地图数据和实时路况结合,完成环境建模,保证在安全的情况下辅助驾驶员完成车道变更、跟车、超车和障碍物避让等操作。
根据行车场景的不同,NOA分为高速NOA和城市NOA两部分。在高速公路等相对稳定的环境中,道路信息较少发生变化,高精地图准确性更高,发挥的作用更大。而城市NOA主要应用于复杂的城市道路环境中,道路信息和标识的变化频率较高,高精地图更新周期长的缺点暴露得更明显。在实时路况方面,存在大量行人、车辆和障碍物,更为复杂,因此其对感知能力的要求较高。
高精地图的劣势主要体现在成本高、更新周期长两方面上。图商需要使用上百台专业移动测量采集设备获取信息,设备的使用成本高。信息经过加密处理和审核后才能被使用,流程长,导致信息容易过时,实际的道路信息可能与地图数据不符。
对于用户来说,路况信息过时的高精地图会影响出行体验,也存在事故隐患。同时,成本问题也会体现在用户的购车开销上。因此,车企提出了“重感知,轻地图”的思路,逐渐降低高精地图的负面影响。
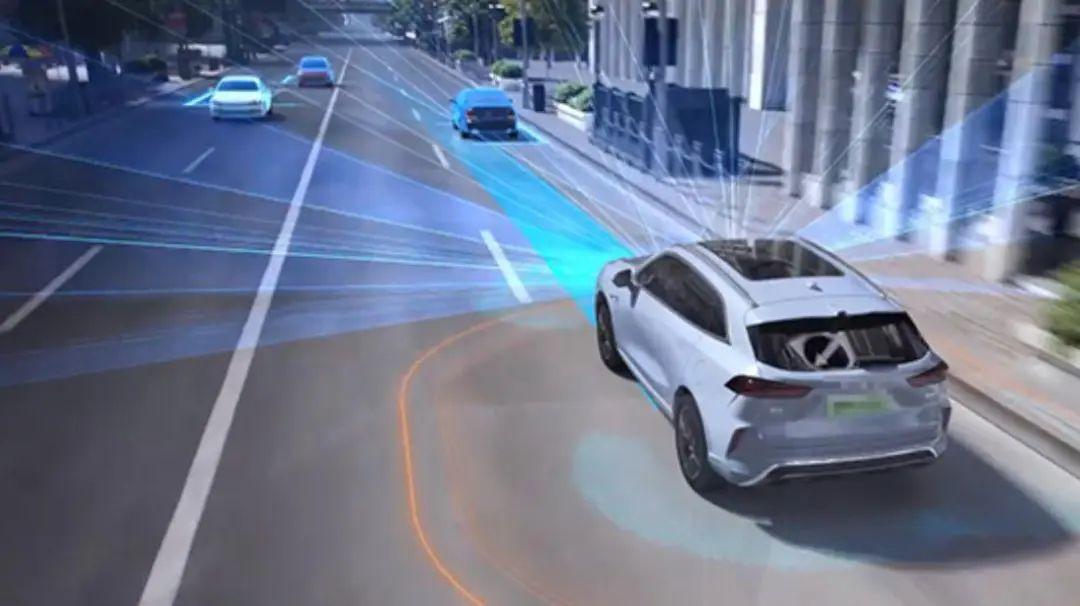
提升车辆感知能力成为侧重点。增加传感器的数量与种类和改进感知算法成为发展方向。传感器负责收集周围环境信息,适当增加数量与种类有助于提升感知精度和范围。
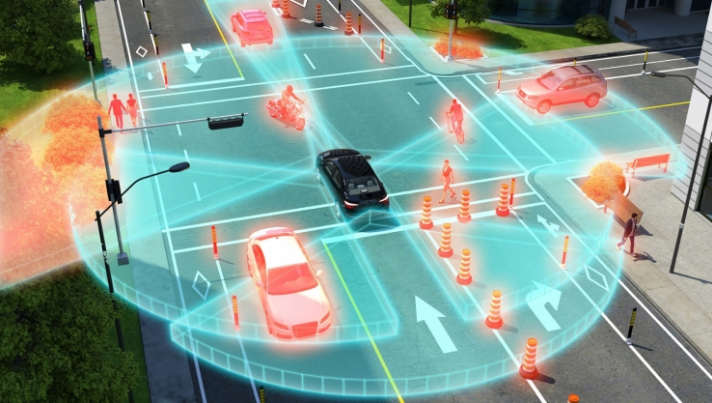
算法方面,目前BEV(鸟瞰图视角/上帝视角)+Transformer深度学习模型架构的建模精度较高,是国内新势力使用的主流方案。该技术可以将环境信息整合为全局视野,图像鲜有遮挡部分,预测更可靠、感知更稳定。数据处理更直接,信息损耗更小。能够更好地处理一些复杂情况,在感知复杂道路、应对恶劣天气和动态交通方面有着更出色的表现。缺点在于比较依赖车企在研发过程中的进行的物体分类和标注,可能出现无法识别静态物体,以及出现幽灵刹车的情况。
针对城市NOA未来的发展,不同的企业有着自己的看法。部分企业,如华为、比亚迪、理想、蔚来、智己的城市NOA都应用上述提到的BEV+Transformer技术,走上了重感知路线。部分图商们也在配合提供轻量智驾方案。简化不必要的地图元素,表达方式更简洁。不仅可以降低制作和部署成本,也能够做到高频率的云端实时更新。

华为ADS

小鹏XNGP

理想AD Max

蔚来NOP

智己IM AD
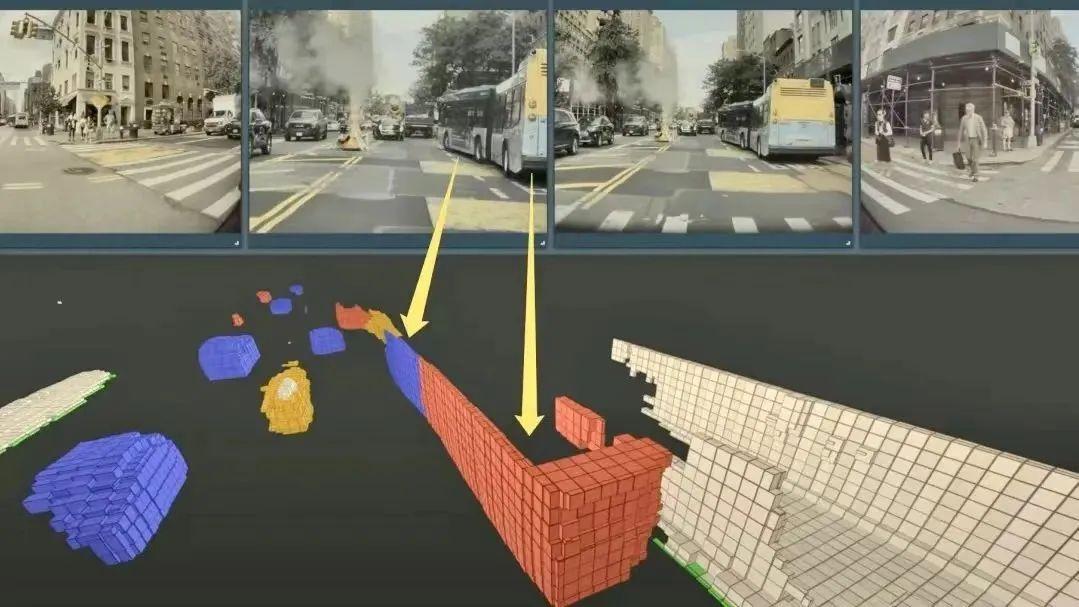
而特斯拉FSD选择纯视觉路线。不依赖高精地图,而是采用“众包”的形式,即通过已售车辆收集道路信息,完成地图绘制,属于轻量化地图的一种。算法方面,应用Occupancy Network(占用网络)技术,将行驶路径上的物体在3D空间中用块状物展现,帮助感知算法判断物体的大致轮廓与形状,能够更出色地回避车辆、行人与障碍物,避免碰撞。纯视觉路线简化了多传感器融合的部分,降低了误检测概率,成本更低,但对于深度估计的准确性弱于雷达。
尽管高精地图暂时遭受冷遇,但并非一边倒的不被看好。广汽集团在去年8月宣布在高精地图产业投资四千万,用于布局相关技术。同时,目前存在观点认为,高精地图提供了车辆感知范围外的道路信息,对于预测、决策和规划更有帮助。此外,更高级别的自动驾驶技术(L4、L5)无法离开高精地图的支撑,感知系统解决实时路况问题,高精地图解决行驶路线问题。两者相辅相成,缺一不可。
对于高精地图在城市NOA中的地位,显然存在着不同的观点。未来的成熟状态将会是何种形式,让我们拭目以待。

 粤公网安备 44010602000157号
粤公网安备 44010602000157号
