
如今,我们讨论智驾汽车的视觉解决方案,必然绕不过两大阵营:一方是以特斯拉为代表的纯视觉方案:环境感知以摄像头主,以超声波雷达和毫米波雷达为辅;另一方是以国内众多高端新能源汽车品牌为代表的视觉融合感知方案:搭载至少一颗激光雷达、数量不等的超声波雷达和毫米波雷达,依靠雷达系统完成距离感知,依靠众多摄像头完成图像感知,从而共同完成环境感知。
今天,我们以特斯拉Model Y和阿维塔11为例,对比两车的主要差别,来聊聊其中的奥秘和差距。
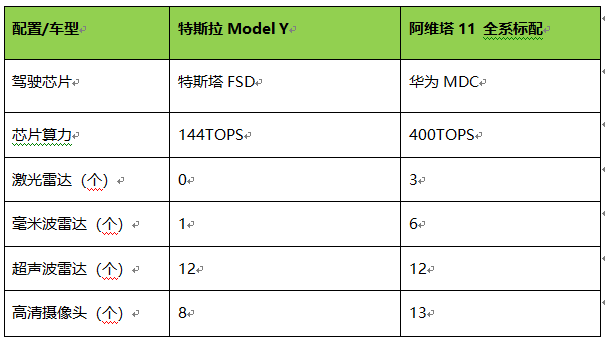
激光雷达,毫米波雷达,雷达配置不同,到底有何差距?
对技术不敏感的消费者来说,雷达和摄像头的数量仅限于多和少的差别,鲜有人去深度了解其背后的逻辑和价值。如果把摄像头比喻成人的眼睛,激光雷达、毫米波雷达和超声波雷达,就相当于给眼睛增加了“透视功能”和“千里眼”。
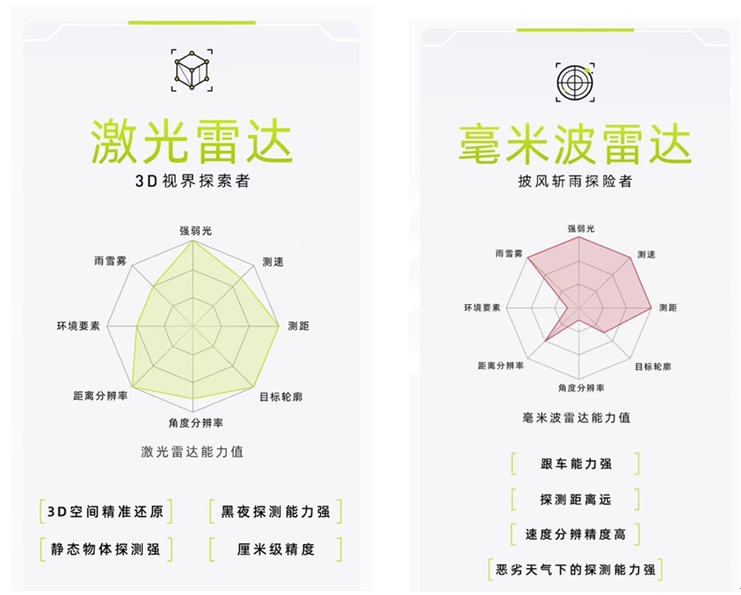
激光雷达虽然数量往往没有超声波雷达多,但它其实是构建车身完整3D空间的最强武器。激光雷达可以不受强弱光环境影响,在测距、测速和目标轮廓的分辨上能够达到厘米级的精度——这样的探索精度,不仅可以及时精准地识别路上的微小物体和行人,在通过狭窄车道或者夜间行驶时,也提供了巨大的安全保障。
毫米波雷达则在强弱光、雨雪雾天气等视线受阻的环境下,拥有强大的测速和测距能力。对比其他雷达,它的跟车能力更强,探测距离更远,速度分辨精度更高,即使在恶劣天气中也能保持极高的探测能力。
对比之下,阿维塔11比Model Y增强了在激光雷达和毫米波雷达上的配置,毫无疑问,这会让阿维塔11的环境感知优势大大增强:
阿维塔11的三颗半固态激光雷达,远距探测达150米,水平视角总覆盖范围约300度,垂直视角可达25度,水平视角总覆盖范围达到300度,垂直视角可达25度;还能同时监测前、左右、左后、右后方。覆盖车身周围大部分范围的3D立体探测,为阿维塔11的环境感知提供了第一层有力的安全保障;6颗毫米波雷达,分别布置在车身四周,形成360度全覆盖,最远距离可达210米。在实际驾驶过程中,无论是变道时对后车速度的精确跟踪,还是极端天气下的距离识别,都能轻松驾驭。
两车都有的配置:超声波雷达和高清摄像头又能做什么?
超声波雷达的最大作用,就是可以利用超声波回声定位原理,探测汽车和障碍物,以及其他车辆之间的距离。高清摄像头则作为直接模拟人眼的视觉载体,将工作重心放在环境要素的图像感知上。摄像头可以捕捉并采集目标的颜色、纹理进行环境分辨:比如检测车道线,让车辆始终处在居中行驶状态,或是检测红绿灯和标志牌,帮助车辆的动态决策。

因此显而易见,摄像头的数量和分辨率不同,会显著影响车辆的图像感知能力。阿维塔11的13颗高清摄像头可以远距探测150米,覆盖整车范围360度,将车辆周围环境无死角收录,摄像头数量上的优势无疑又在图像感知维度增强了它对Model Y的优势。
纯视觉vs视觉融合,究竟孰强孰弱?
用马斯克本人的话来说,他认为“雷达和视觉感知始不一致。”诚然,特斯拉在自动驾驶算法和大数据层面或许有着一定的先手优势。但在安全层面,面对我国更为复杂的路况,显然有激光雷达作为加强的融合感知方案更加安全。阿维塔11的四层保证,不仅做到了全方位的立体覆盖,而且预留了足够的技术冗余,对汽车的安全驾驶来说,所有的技术冗余都会转变为更大的安心。



























 粤公网安备 44010602000157号
粤公网安备 44010602000157号


网友评论
最新评论 · 15